
News
- Feb 2026. Two papers accepted to CVPR 2026, including one oral!
- Feb 2026. Co-organizing the Multimodal Spatial Intelligence (MUSI) workshop in CVPR.
- Aug 2025. One paper accepted to SIGGRAPH Asia 2025.
- Jun 2025. Three papers accepted to ICCV 2025.
- Jun 2025. Serving as a program committee member at Eurographics 2026.
- May 2025. One paper accepted to TMLR 2025.
- May 2025. Serving as an Area Chair at 3DV 2026.
- Sept 2024. Finished up at Stanford and started full-time at Nvidia.
- Jun 2024. Serving as a program committee member at Eurographics 2025.
Selected Publications

Learning Convex Decomposition via Feature Fields
Yuezhi Yang, Qixing Huang, Mikaela Angelina Uy*, Nicholas Sharp*
CVPR, 2026 (Oral)
Project Page Paper Code
SpaceTools: Tool-Augmented Spatial Reasoning via Double Interactive RL
Siyi Chen, Mikaela Angelina Uy, Chan Hee Song, Faisal Ladhak, Adithyavairavan Murali, Qing Qu, Stan Birchfield, Valts Blukis, Jonathan Tremblay
CVPR, 2026
Project Page Paper Code
Img2CAD: Reverse Engineering 3D CAD Models from Images through VLM-Assisted Conditional Factorization
Yang You, Mikaela Angelina Uy, Jiaqi Han, Rahul Thomas, Haotong Zhang, Yi Du, Hansheng Chen, Francis Engelmann, Suya You, Leonidas Guibas
SIGGRAPH Asia, 2025
Paper
PartField: Learning 3D Feature Fields for Part Segmentation and Beyond
Minghua Liu*, Mikaela Angelina Uy*, Donglai Xiang, Hao Su, Sanja Fidler, Nicholas Sharp, Jun Gao
ICCV, 2025
Project Page Paper Code
Perspective-Aware Reasoning in Vision-Language Models via Mental Imagery Simulation
Phillip Y. Lee, Jihyeon Je, Chanho Park, Mikaela Angelina Uy, Leonidas Guibas, Minhyuk Sung
ICCV, 2025
Project Page Paper Code
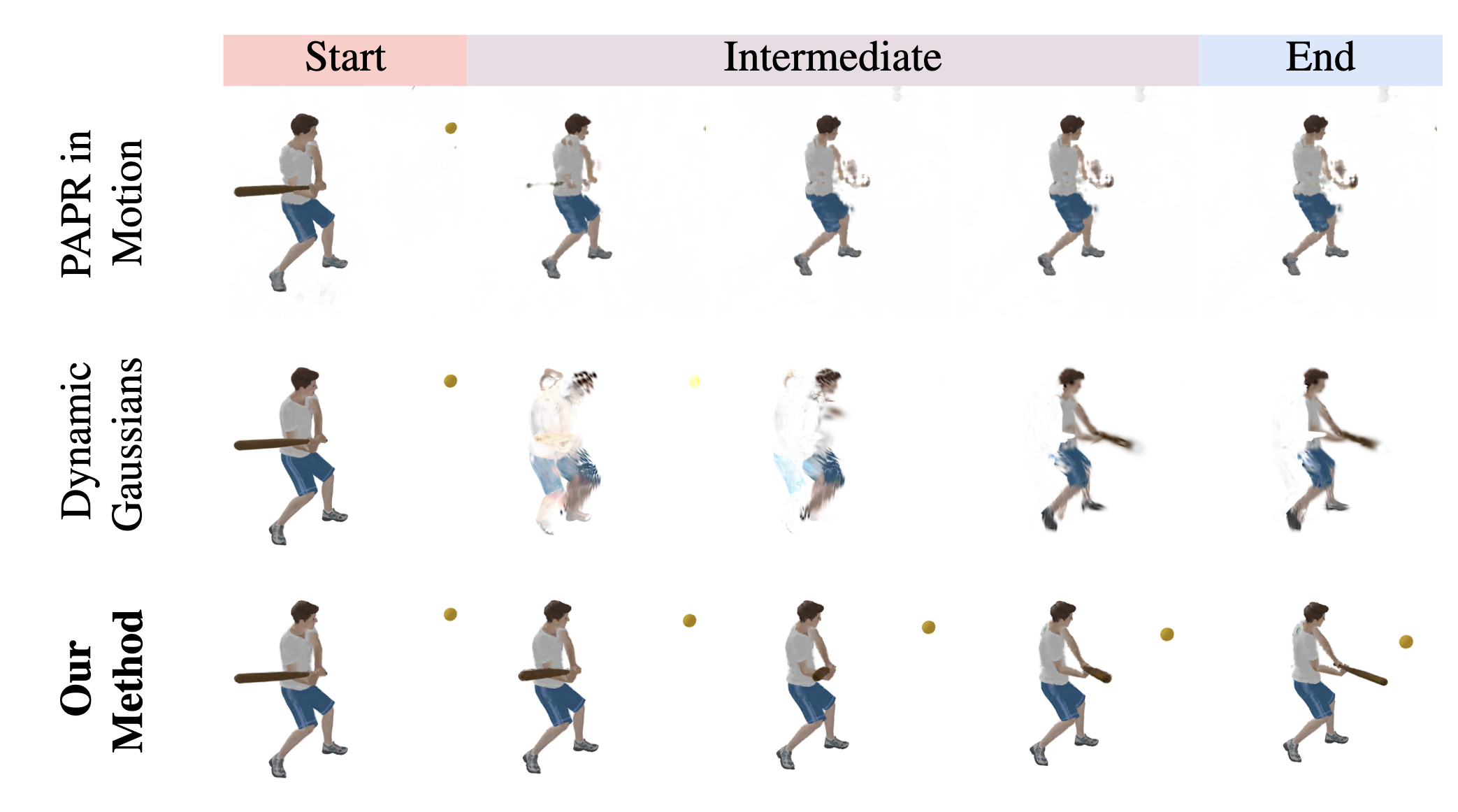
Global Motion Corresponder for 3D Point-Based Scene Interpolation under Large Motion
Junru Lin*, Chirag Vashist*, Mikaela Angelina Uy, Colton Stearns, Xuan Luo, Leonidas Guibas, Ke Li
ICCV, 2025
Project Page Paper Code
Monocular Dynamic Gaussian Splatting is Fast and Brittle and Scene Complexity Rules
Yiqing Liang, Mikhail Okunev, Mikaela Angelina Uy, Runfeng Li, Leonidas Guibas, James Tompkin, Adam Harley
TMLR, 2025
Paper Data Code
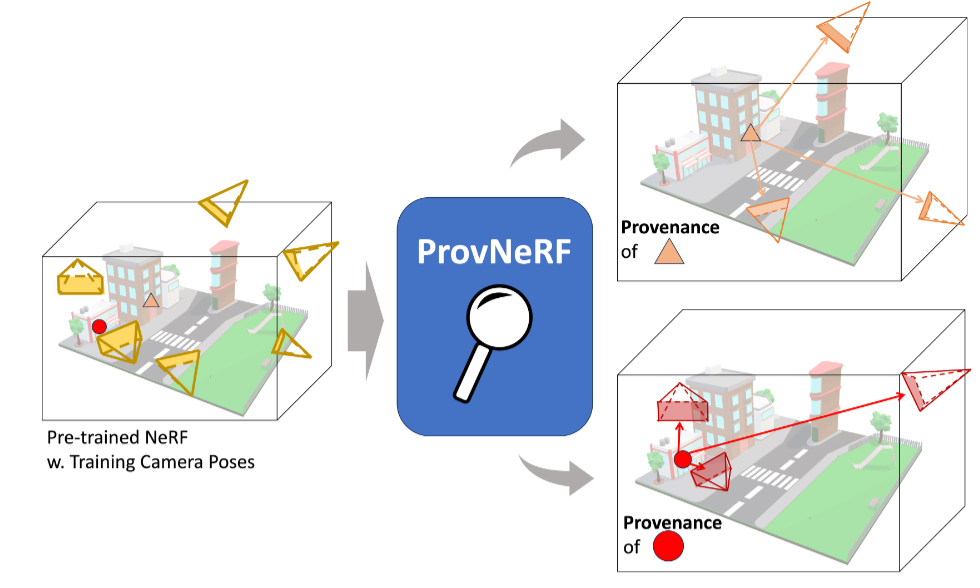
ProvNeRF: Modeling per Point Provenance in NeRFs as a Stochastic Process
George Kiyohiro Nakayama, Mikaela Angelina Uy, Yang You, Ke Li, Leonidas Guibas
Advances in Neural Information Processing Systems (NeurIPS), 2024
Project Page Paper
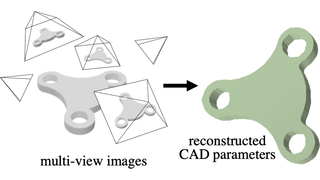
MV2Cyl: Reconstructing 3D Extrusion Cylinders from Multi-View Images
Eunji Hong, Nguyen Minh Hieu, Mikaela Angelina Uy, Minhyuk Sung
Advances in Neural Information Processing Systems (NeurIPS), 2024
Paper

Dynamic Gaussian Marbles for Novel View Synthesis of Casual Monocular Videos
Colton Stearns, Adam Harley, Mikaela Angelina Uy, Florian Dubost, Federico Tombari, Gordon Wetzstein, Leonidas Guibas
SIGGRAPH Asia, 2024
Project Page Paper Code
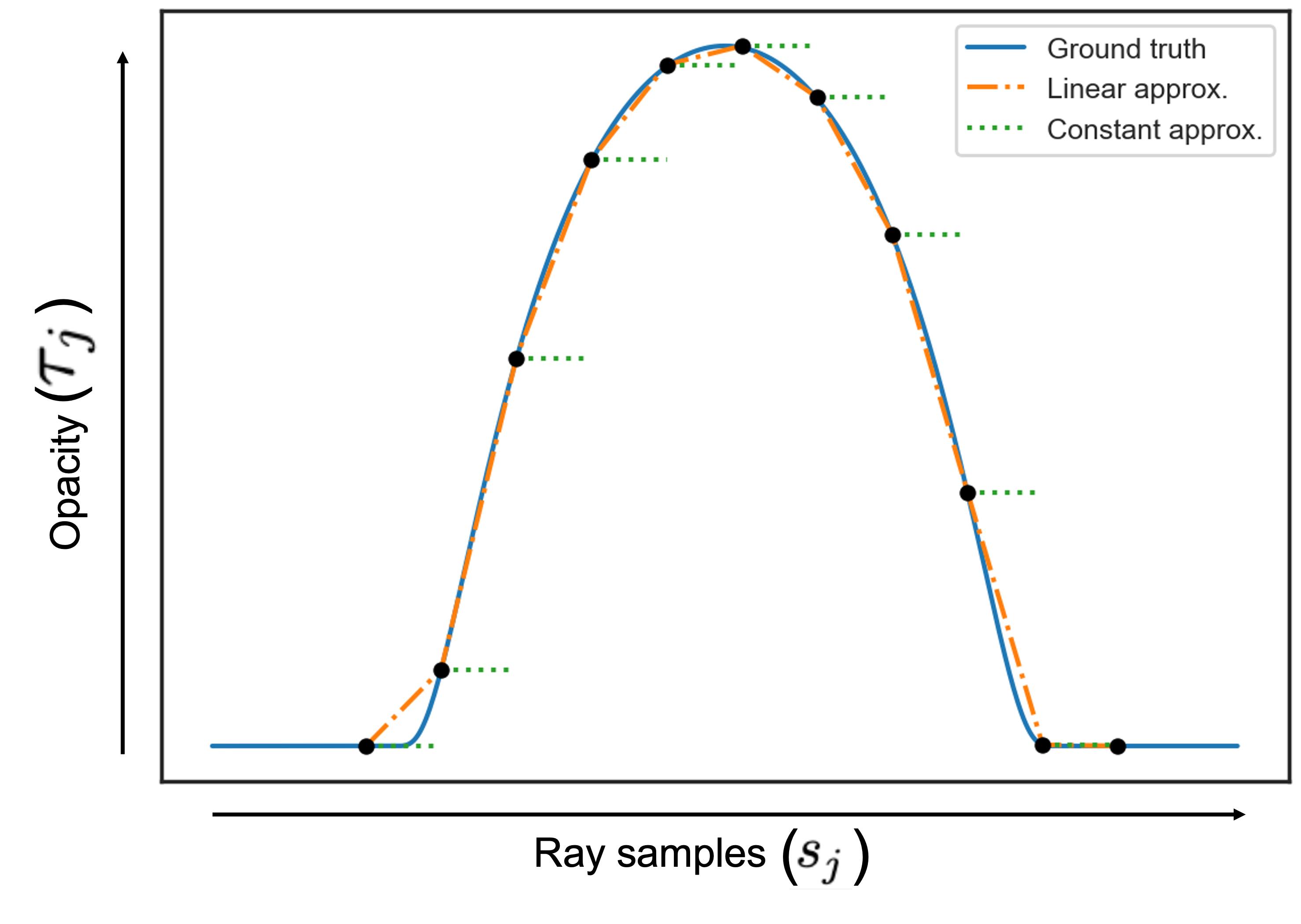
NeRF Revisited: Fixing Quadrature Instability in Volume Rendering
Mikaela Angelina Uy, George Kiyohiro Nakayama, Guandao Yang, Rahul Krishna Thomas, Leonidas Guibas, Ke Li
Advances in Neural Information Processing Systems (NeurIPS), 2023
Project Page Paper Code Poster
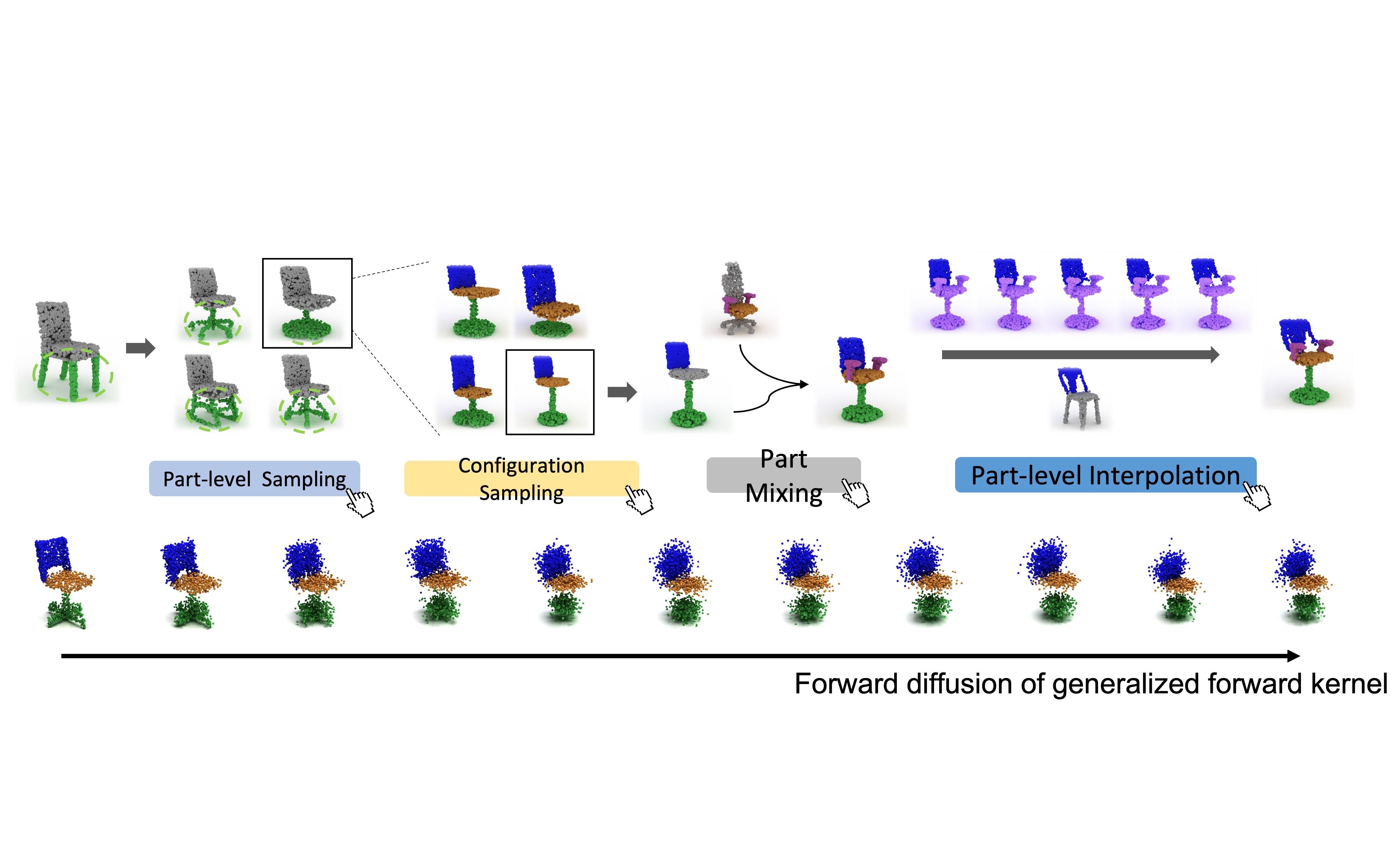
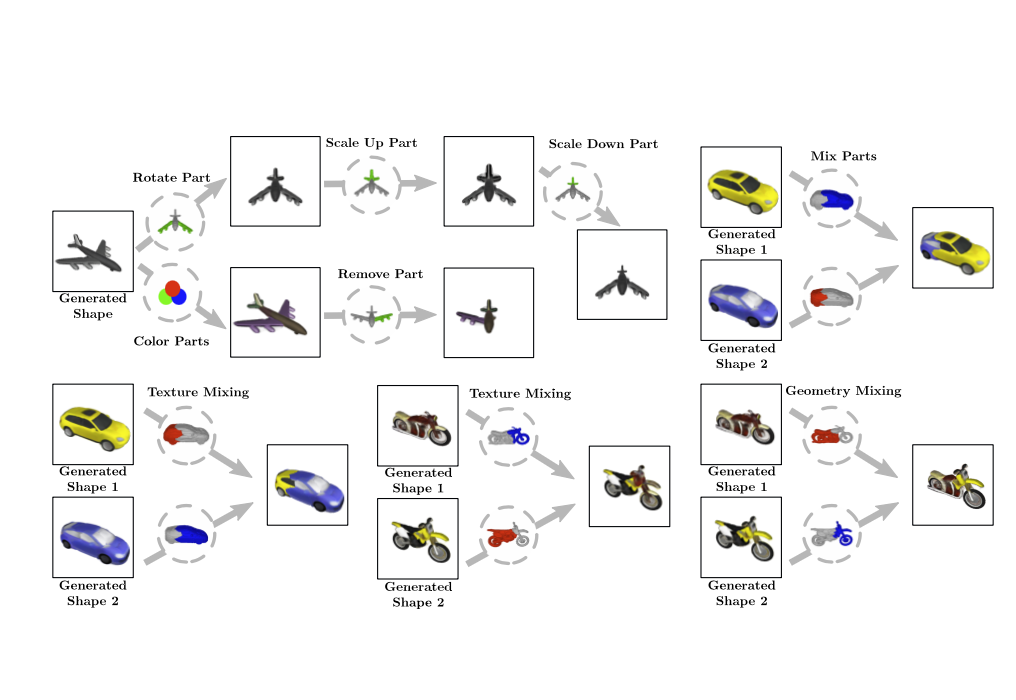
DiffFacto: Controllable Part-Based 3D Point Cloud Generation with Cross Diffusion
George Kiyohiro Nakayama, Mikaela Angelina Uy, Jiahui Huang, Shi-Min Hu, Ke Li, Leonidas Guibas
IEEE International Conference on Computer Vision (ICCV), 2023
Project Page Paper Code Video
OptCtrlPoints: Optimizing Control Points for Biharmonic 3D Shape Deformation
Kunho Kim*, Mikaela Angelina Uy*, Despoina Paschalidou, Alec Jacobson, Leonidas Guibas, Minhyuk Sung
Pacific Graphics (Full Paper), 2023
Project Page Paper Code Video Slides
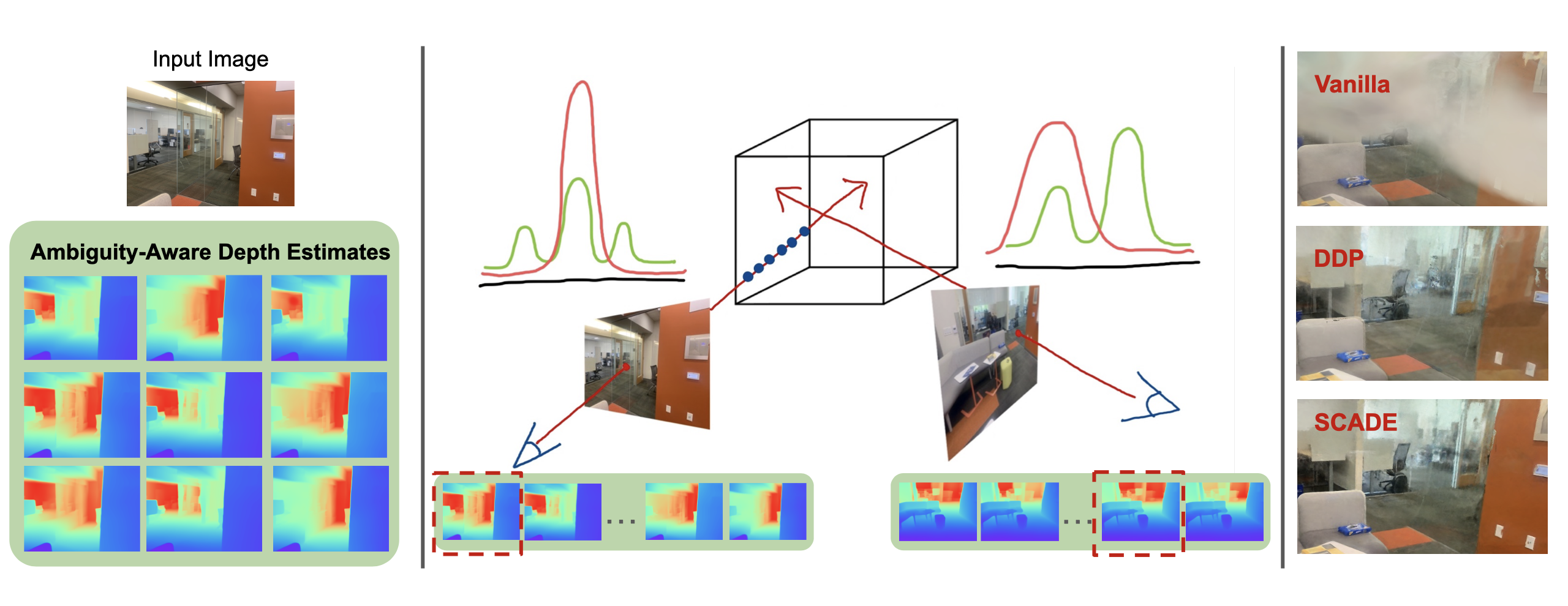
SCADE: NeRFs from Space Carving with Ambiguity-Aware Depth Estimates
Mikaela Angelina Uy, Ricardo Martin-Brualla, Leonidas Guibas, Ke Li
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023
Project Page Paper Code Video
PartNeRF: Generating Part-Aware Editable 3D Shapes without 3D Supervision
Konstaninos Tertikas, Despoina Paschalidou, Boxiao Pan, Jeong Joon Park, Mikaela Angelina Uy, Ioannis Emiris, Yannis Avrithis, Leonidas Guibas
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023
Project Page Paper
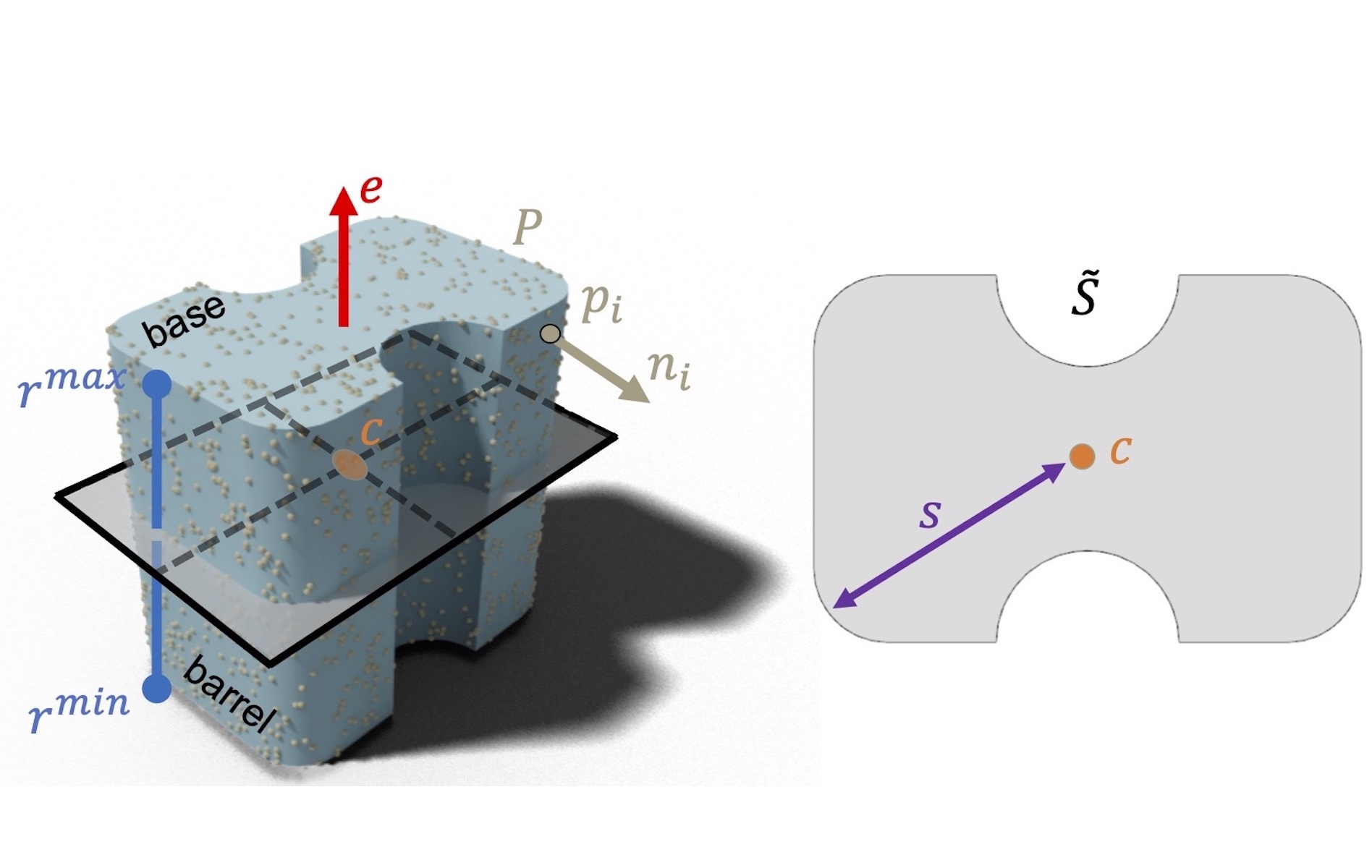
Point2Cyl: Reverse Engineering 3D Objects from Point Clouds to Extrusion Cylinders
Mikaela Angelina Uy*, Yen-yu Chang*, Minhyuk Sung, Purvi Goel, Joseph Lambourne, Tolga Birdal, Leonidas Guibas
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022
Project Page Paper Code Video Poster
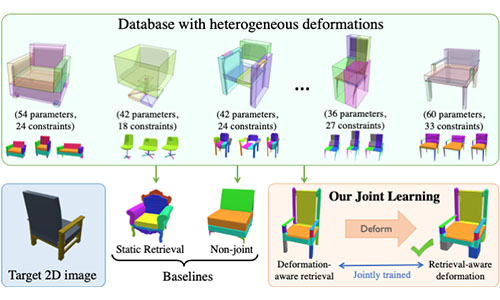
Joint Learning of 3D Shape Retrieval and Deformation
Mikaela Angelina Uy, Vladimir G. Kim, Minhyuk Sung, Noam Aigerman, Siddhartha Chaudhuri, Leonidas Guibas
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021
Project Page Paper Code Video Poster
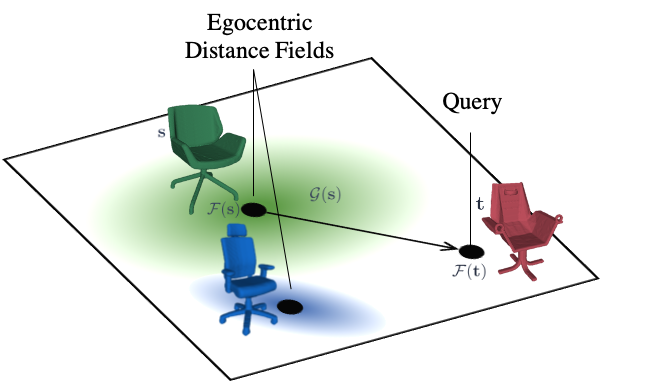
Deformation-Aware 3D Model Embedding and Retrieval
Mikaela Angelina Uy, Jingwei Huang, Minhyuk Sung, Tolga Birdal, Leonidas Guibas
European Conference on Computer Vision (ECCV), 2020
Project Page Paper Code 10-min Video 1-min Video
LCD: Learned Cross-Domain Descriptors for 2D-3D Matching
Quang-Hieu Pham, Mikaela Angelina Uy, Binh-Son Hua, Duc Thanh Nguyen, Gemma Roig, Sai-Kit Yeung
AAAI Conference on Artificial Intelligence (AAAI), 2020 (Oral)
Project Page Paper Code

Revisiting Point Cloud Classification: A New Benchmark Dataset and Classification Model on Real-World Data
Mikaela Angelina Uy, Quang-Hieu Pham, Binh-Son Hua, Duc Thanh Nguyen, Sai-Kit Yeung
IEEE International Conference on Computer Vision (ICCV), 2019 (Oral)
Project Page Paper Supplementary Code Poster
Invited Talks
- Apple Machine Learning Research (MLR), September 7, 2023, Towards Controllable 3D Content Creation by Leveraging Geometric Priors
- Google, July 12, 2023, NeRF Revisited: Fixing Quadrature Instability in Volume Rendering
- SFU Visual Computing and Robotics (VCR) Seminar, June 26, 2023, Towards Controllable 3D Content Creation by Leveraging Geometric Priors
- Structural and Compositional Learning on 3D Data, CVPR 2023 Workshop, June 18, 2023, Towards Controllable 3D Content Creation by Leveraging Geometric Priors
- KAIST, January 9, 2023, SCADE: NeRFs from Space Carving with Ambiguity-Aware Depth Estimates
- VinAI Seminar Series, July 22, 2022, Learning to Vary 3D Models for Universally Accessible 3D Content Creation
- Brown Vision Computing Seminar, April 11, 2022, Learning to Vary 3D Models for Universally Accessible 3D Content Creation
- Stanford G-Cafe, March 10, 2022, Point2Cyl: Reverse Engineering 3D Objects from Point Clouds to Extrusion Cylinders
Selected Awards
- EECS Rising Stars, 2023
- Apple Scholars in AI/ML PhD Fellowship, 2023
- Snap Research Fellowship, 2022
- Meta PhD Fellowship Finalist, 2023
- School of Engineering Fellowship, Stanford University, 2019-2020
- HKSAR Government Targeted Scholarship (Full 4-year university scholarship)
- NUS Graduate Scholarship for ASEAN Nationals (Full masters scholarship)
- Google Women Techmakers Scholarship, 2016
- Epsilon Fund Award, HKUST Mathematics Department, 2017
- International Mathematical Olympiad (IMO) Bronze Medalist, 2012, 2013
- Philippine Mathematical Olympiad 1st runner-up, 2012, 2013
Teaching Experiences
- Stanford CS 348n Guest Lecture, May 31, 2023, Neural Radiance Fields: Sparse View and Dynamic Scenes
- Stanford CS 348n Guest Lecture, May 24, 2023, Continuous and Discrete Shape Edits/Deformations
- Stanford CS 348n Guest Lecture, February 16, 2022, Neural Shape Variation and Generation
- Teaching Assistant, Winter 2021, Computer Graphics: Geometric Modeling/Processing (CS 348a), Stanford University
Academic Services
Reviewer: CVPR, ICCV, ECCV, SIGGRAPH, SIGGRAPH Asia, BMVC, 3DV, AAAI, TVCG, Eurographics, Pacific Graphics, Neurips, ICLR
Hobbies and Interests
For most of my pre-university life, I was into competitive mathematics, with geometry being a favorite topic. Back then, I competed in math competitions local and abroad representing the Philippine Team. During my spare time back at home, I train elementary and high school students for international math competitions. I was part of the training team of the 2017-2020 PH IMO team, and I previously led the PH team to elementary math competitions.
Outside of work, I enjoy bouldering, hiking, cooking and scuba diving. I was also part of the HKUST Women's Soccer Team back in undergrad.